L’imagerie 3D dans le domaine du contrôle industriel
L’imagerie 3D dans le domaine du contrôle industriel est un sujet en perpétuelle évolution. Grâce aux progrès techniques réalisés par les caméras et les systèmes de traitement, le nombre d’applications potentielles dans le domaine de l’automatisation industrielle ne cesse d’augmenter et de se diversifier : guidage de robots, mesure de dimensions ou de volumes, contrôle de formes, contrôle d’aspect etc.
L’imagerie 3D se caractérise par une grande variété de méthodes de capture d’image. Les plus connues sont la triangulation laser et la stéréovision. Depuis quelques années une nouvelle technologie – le temps de vol ou Time-of-Flight vient compléter le champ des possibilités. A chaque technologie, ses avantages et ses limites, et le choix dépend du type d’applications que l’on souhaite réaliser.
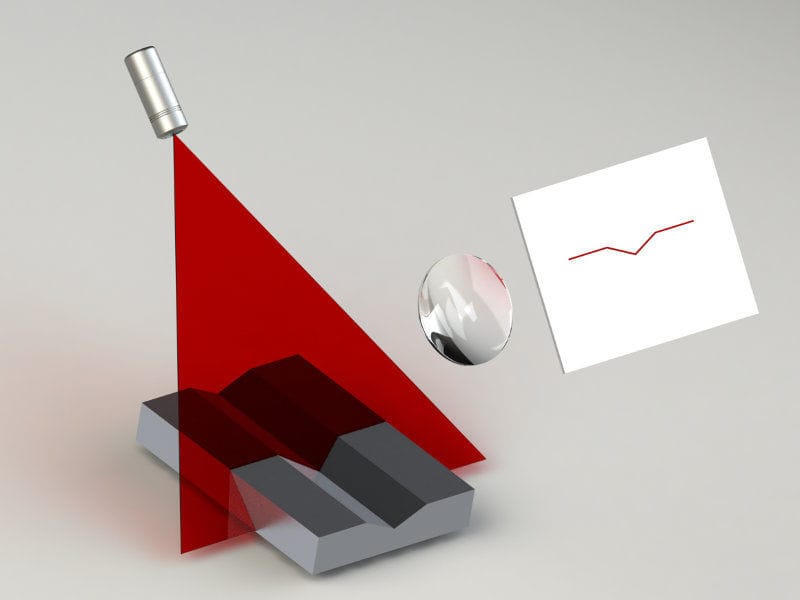
Triangulation laser
La triangulation laser est une technique de balayage 3D largement utilisée pour l’inspection industrielle et la mesure. Elle utilise une caméra 2D et une source de lumière laser. Le principe consiste à examiner la modification du faisceau qui est projeté sur un objet, de sorte que la distance entre l’objet et la source de lumière laser est calculée sur la base des coordonnées de position des lignes laser sur plusieurs images. La triangulation laser repose sur le mouvement de l’objet pour accumuler les profils et calculer le nuage de points 3D. Le nuage de points peut alors être projeté sur un plan pour produire une carte de profondeur, c’est-à-dire une image 2D qui remplace les valeurs d’intensité avec des données de profondeur.
Champs d’application
Parce que la lumière structurée est incorporée dans la méthode, il y a rarement des problèmes avec des surfaces difficiles ou une faible lumière ambiante. La triangulation laser fournit des données très précises même pour les objets à faible contraste. Il y a cependant quelques contraintes avec la triangulation laser : elle ne fonctionne que s’il y a un déplacement de l’objet, elle est relativement lente et peine à gérer les vitesses toujours croissantes des environnements de production modernes et enfin, suivant l’angle de projection du faisceau laser, des zones occultées peuvent apparaître nécessitant l’usage d’un deuxième laser.
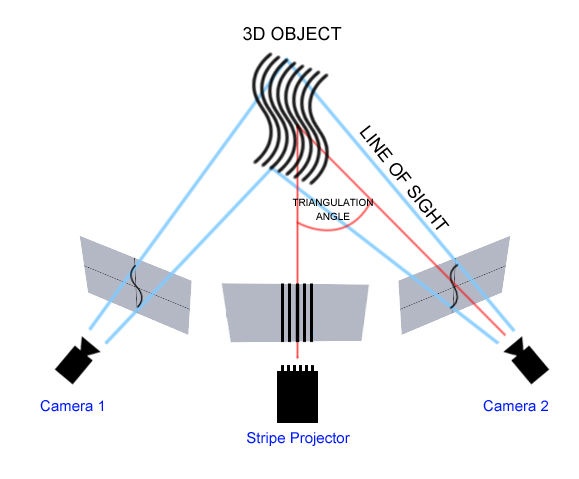
Stéréovision et lumière structurée
La vision stéréoscopique fonctionne de la même manière que la vision humaine. Deux caméras 2D prennent des images d’un objet à partir de deux positions différentes et le système de traitement associé analyse alors ces données pour calculer l’information de profondeur 3D en utilisant le principe de la triangulation. La difficulté repose sur l’étape de l’appariement, qui consiste à retrouver le même point de l’objet dans les images acquises par les deux caméras. Cela peut être compliqué lorsque vous regardez des surfaces homogènes et dans de mauvaises conditions d’éclairage, car les données sont souvent trop confuses pour produire des résultats fiables. Ce problème peut être résolu avec la projection d’un motif lumineux structuré pour donner aux images une structure claire et prédéfinie.
Champs d’application
Un avantage clair pour la vision stéréoscopique est sa haute précision dans la mesure d’objets avec une petite plage de travail. Cette haute précision nécessite généralement des marques de référence, un motif aléatoire ou que des motifs de lumière créés par une source de lumière structurée soient projetés sur l’objet. La vision stéréoscopique est généralement efficace pour la technique de mesure des coordonnées et la mesure 3D des espaces de travail. Cependant, il est souvent moins adapté aux environnements de production, car il implique des charges de processeur élevées et augmente les coûts globaux du système lorsqu’il est utilisé dans des applications industrielles.
Temps de vol (Time-of-Flight)
La méthode du temps de vol (ToF) est une technologie très efficace pour générer des données de profondeur et mesurer les distances. Une caméra ToF fournit deux types d’informations pour chaque pixel : la valeur d’intensité (valeur de gris) et la distance de l’objet au capteur, à savoir la valeur de profondeur.
La technique de temps de vol dispose de deux méthodes différentes : onde continue et ondes pulsées.
La méthode de temps de vol à onde continue est basée sur des mesures de longueur de phase pour une source de lumière modulée. La méthode est mature et fonctionne avec une électronique standard. Les capteurs utilisés dans cette méthode sont relativement grands et n’offrent que de faibles résolutions.
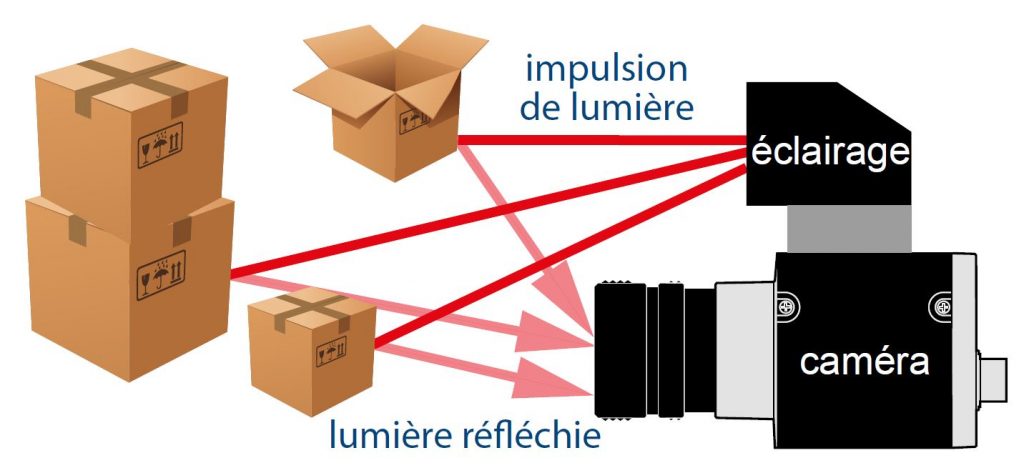
La méthode par ondes pulsées mesure les distances en fonction du temps de parcours des impulsions de lumière qui heurtent un objet et sont réfléchies vers la caméra. Cela nécessite une électronique extrêmement rapide et précise. Les capteurs requis fonctionnent à une résolution plus élevée que ceux du procédé à onde continue, car leurs pixels plus petits permettent une utilisation plus efficace de la surface du capteur.
Quel que soit la méthode, une caméra ToF génère un nuage de points simplement et en temps réel, tout en fournissant simultanément une carte d’intensité et de confiance.
Champs d’application du ToF
Le processus ToF est bien adapté pour les mesures de volume, les tâches de palettisation et les véhicules autonomes dans un environnement de production et de logistique. Les caméras ToF peuvent également aider dans le domaine médical avec le positionnement et la surveillance des patients et dans l’automatisation d’usine avec le contrôle de robot et les tâches de préhension.
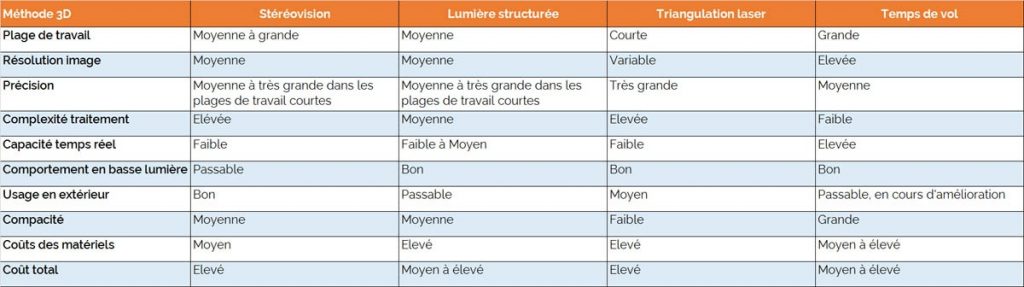
Comparaison des technologies 3D
Le tableau ci-dessous résume les performances de chacune des technologies 3D présentées au regard des critères importants d’une application de vision.